TM 1-1510-218-10
3B-21
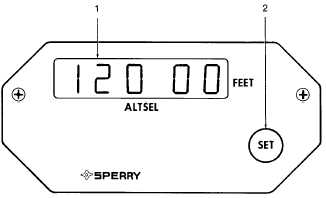
1. Selected Altitude Display
2. Altitude Selector SET Knob
Figure 3B-11. Altitude Select Controller
3B-20. GYROMAGNETIC COMPASS SYSTEM.
a. Description.
Two
identical
compass
systems provide accurate directional information for
the aircraft at all latitudes of the earth. For heading
reference,
two
modes
of
operation
are
used:
directional gyro (FREE) mode, or slaved (SLAVE)
mode. In areas where magnetic references are
reliable, the system is operated in the SLAVE mode.
In this mode, the directional gyro is slaved to the
magnetic flux valve that supplies magnetic reference
for correction of the apparent drift of the gyro. In
FREE mode, the system is operated as a free gyro. In
this mode, latitude corrections are manually introduced
using the INCREASE / DECREASE switches, Figure
17, Sheet 2. The slave/free mode is selected, as
desired, using the SLAVE / FREE switch, Figure 2-17,
Sheet 2.
b. Controls and Functions.
(1) COMPASS #1 Switch. Selects desired
source of magnetic heading information for pilot's flight
director/autopilot, HSI, flight management system and
copilot's RMI. Refer to Figure 2-17, Sheet 2.
(2) COMPASS # 2 Switch. Selects desired
source of magnetic heading information for copilot's
flight director/ autopilot, HSI, and pilot's RMI.
(3) ALL SYSTEMS ON COMPASS 1 /
NORM / ALL SYSTEMS ON COMPASS 2 Switch.
This switch, located adjacent to the pilot's compass
switch, allows the pilot to select all systems to operate
off compass 1 or compass 2. When the switch is in
the NORM position, magnetic heading information is
provided to the pilot's flight director/autopilot, HSI,
flight management system, and copilot's RMI.
(4) GYRO SLAVE / FREE Switch. Controls
system mode of operation.
(a) SLAVE. Places system in SLAVE
mode.
(b) FREE. Places system in FREE
mode.
(5) INCREASE
/
DECREASE
Switch.
Provides manual fast synchronization for the system.
(a) INCREASE. Causes gyro heading
output to increase.
(b) DECREASE. Causes gyro heading
output to decrease.
(6) Compass Synchronization Annunciator.
Two compass slave annunciators, located on both the
pilot's and copilot's HSI's, provide a visual indication of
system synchronization.
3B-21. NAV RECEIVERS (KFS-579A, KNR-634).
a. Description.
Two
NAV
(KFS-579A/
KNR-634
and
KFS-564A/KNR-634)
airborne
navigation
receivers
are
provided
which
allow
selection and storing of navigation frequencies. Refer
to Figures 3B-12 and Figure 3B -13.
The NAV receivers receive and interpret VHF
omnidirectional radio range (VOR) and localizer (LOC)
signals in the frequency range of 108.00 to 117.95
MHz, glideslope signals in the frequency range of
329.15 to 335.00 MHz, and marker beacon signals to
75 MHz.
In addition, the KFS-579A #1 NAV/TAC control
tunes the KTU-709 DME/TACAN system to 252
TACAN channels. Fifty-two TACAN channels are
paired with frequencies in the COMM band. These are
channels 1 through 16, and 60 through 69, which
correspond to VHF frequencies 134.40 MHz through
135.95 MHz respectively.
Marker beacon receivers are utilized with the
NAV receivers, to provide accurate fixes informing the
pilot of his passage over beacon stations. Three types
of beacons are used. They are the outer (blue
annunciator) marker, middle (amber annunciator)
marker, and inner (white annunciator) marker. The
three markers are used in conjunction with radio
instrument landing systems. The markers are all
transmitted at a frequency of 75 MHz using three
different frequencies of AM modulation.