TM 1-1510-218-10
3C-50
Once go-around is selected, any roll mode can
be selected. The wings level roll command will cancel.
The go-around mode is canceled by selecting another
pitch mode or TCS.
(12) TACAN Mode. The TACAN mode is
selected by selecting the radio position with the NAV
source selector on the EFIS control panel and either
VOR 1 or VOR 2 selected by the CRS 1/2 switch to a
valid TACAN frequency. TACAN distance information
will be displayed on the EHSI.
NOTE
The NAV/TAC receiver must be tuned to a
valid TACAN frequency.
TACAN functions are identical to VOR using TA CAN
information rather than VOR signals. The ARM / CAP
annunciation is the same as in VOR mode.
(13) TACAN Approach Mode. The TACAN
approach mode is the same as a VOR approach
mode, except that it uses a TACAN in place of a VOR
station.
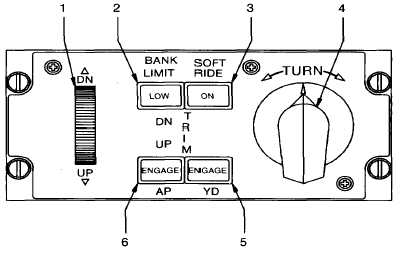
g. Autopilot
Controller.
The
autopilot
controller provides the means of engaging the
autopilot and yaw damper, as well as manually
controlling the autopilot through the turn knob and
pitch wheel. Refer to Figure 3C-21. The autopilot
system limits are listed in Table 3C-12.
1. Pitch Thumbwheel
2. Bank Limit Switch
3. Soft Ride Switch
4. Turn Knob
5. YD Engage Switch
6. AP Engage Switch
Figure 3C-21. Autopilot Controller
Table 3C-12. Operating Parameters
MODE
CONTROL OR
SENSOR
PARAMETER
VALUE
Yaw Damper
Yaw Control
Engage Limit
Unlimited
A/P Engage
Engage Limit
Roll Up to ± 90°
Pitch Up to ± 30°
Basic
Touch Control
Roll Control Limit
Up to ± 45° Roll
A/P
Steering TCS
Pitch Control Limit
Up to ± 20° Pitch
Turn Knob
Roll Angle Limit
± 30°
Roll Rate Limit
± 15°/sec
Pitch Wheel
Pitch Angle Limit
± 15° Pitch
Heading Hold
Roll Angle Limit
Less than 6° and no roll mode
selected