TM 55-1510-222-10
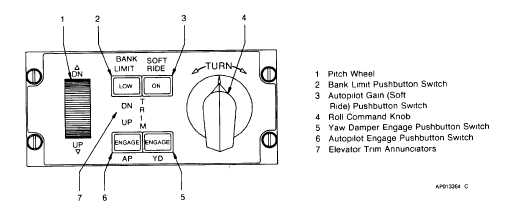
Figure 3-21. Autopilot Controller (PC-400)
(15). Go-Around Mode. The Go-Around Mode is
selected by depressing the remote go-around switch.
When selected, all other modes are reset, and the
remote go-around (GA) and yaw damp engaged (YD
ENG) annunciators will be illuminated. The ADI
command cue receives a wings level command (zero
command when roll is zero). The command cue also
receives the go-around command which is a 7-degree
visual pitch up attitude command. Selecting GA
disconnects the autopilot. However, the yaw damper
remains on.
Once go-around is selected, any roll mode can be
selected. The wings level roll command will cancel.
The go-around mode is cancelled by selecting another
pitch mode, or CWS.
e. Autopilot Controller.
(1) Description. The autopilot controller (FIG. 3-
21), provides the means of engaging the autopilot and
yaw damper as well as manually controlling the
autopilot through the turn knob and pitch wheel. The
autopilot system limits are shown in Table 3-1.
(2) Controls/Indicators and Functions (FIG. 3-21):
(a) UP/DN Pitch Wheel. Movement of the
pitch wheel will cancel only ALT HOLD, and ALTSEL
CAP modes. With vertical modes of VS or IAS
selected on the mode selector, rotation of the pitch
wheel will change the respective displayed vertical
mode reference. VS or IAS modes may be cancelled
by pressing the mode button in the mode selector. If
VS or IAS are not selected, the pitch wheel works as
described above. The pitch wheel is always disabled
during a coupled glideslope approach.
(b)
BANK
LIMIT
Annunciator/Pushbutton
Switch. Selection of the Bank Limit mode on the
autopilot controller provides a lower maximum bank
angle while in the Heading Select mode. LOW will
illuminate on the Bank Limit switch. The lower bank
limit is inhibited and LOW is extinguished during NAV
mode captures. If Heading Select is again engaged,
Bank Limit will again be illuminated. Pressing Bank
Limit when illuminated will return autopilot to normal
bank limits.
3-39